Home
Proyectos
Publicaciones
Tesis
Docencia
Miembros
Proyectos
Active-SLAM en tiempo constante para sistemas multi-robot
Navegación autónoma de robots artóropodos en terrenos irregulares
Monitoreo de Bosques Nativos mediante Vehículos Autónomos No-Tripulados
Navegación Teach & Replay Visual-Inercial
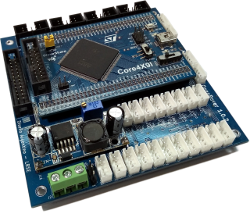
OpenRover: autopiloto para vehiculos terrestres
Navegación autónoma de robot omnidireccional para transporte de cargas
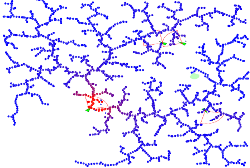
SPTAM: Stereo Parallel Tracking and Mapping
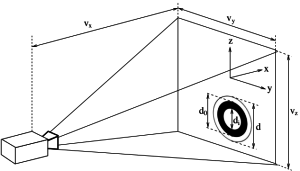
WhyCon: localización externa basado en visión